

Team MART - Eurobotopen competition 2009
Vítejte na stránce MAtfyzáckého Robotického Týmu!
Tato stránka pojednává o naší účasti v soutěži Eurobot v roce 2009.
Kdo jsme
Jak název napovídá, jsme robotický tým složený převážně z matfyzáků (studentů Matematicko-fyzikální fakulty Univerzity Karlovy). Kromě nich ale do týmu patří ještě další a nezanedbatelní nadšenci do robotiky. Úplné složení týmu prozradí podsekce složení týmu.
O co se snažíme
Náš tým se chystá hrdinně utkat se soky v soutěži Eurobot, jejíž české kolo se odehraje již o víkendu 24.–25. dubna. Kromě toho, že chceme v tomto klání dosáhnout co nejlepšího umístění a v případě úspěchu co nejlépe reprezentovat UK na mezinárodním finále, máme i cíle ryze dlouhodobé. Mezi ně patří podpořit zájem o robotiku na naší fakultě a do budoucna utvořit stabilní tým, který bude fakultu i univerzitu dále reprezentovat na dalších soutěžích a akcích. Konečně účast v soutěži Eurobot nám přináší cenné zkušenosti, potěšení z práce v týmu i nové známosti. Chcete-li se přesvědčit jak to vypadá zamiřte do fotogalerie.
Historie
Účast v soutěži Eurobot má na Matematicko-fyzikální fakultě dlouholetou tradici—vždyť tato fakulta je jedním ze dvou hlavních organizátorů soutěže Eurobot v republice. Náš nynější MART tak navazuje na snahy a úspěchy starých matfyzáckých robotických legend, jako například týmu Sirael . Ten se v roce 2004 umístil ve světovém finále na skvělém čtvrtém místě. Podobně skvělý byl i náš jmenovec v témže roce, jenž tehdy zvítězil v národním kole.
Členská základna současného MART je potomkem týmu LOGIO, jenž se do soutěže přihlásil v roce 2007. Název jsme převzali od svého vzoru, týmu MART roku 2004, abychom založili jednotné matfyzácké robotické těleso, které minulé úspěchy zopakuje i rozvine v úspěchy ještě výraznější. Zároveň věříme, že tím zakládáme tradici, která přežije alespoň nás, současné členy MARTu. První obnovený MART se zúčastnil soutěže roku 2008, kde se umístil na pěkném, byť nepostupovém pátém místě. Doplatili jsme na přílišnou zálibu ve složitých technologiích, z čehož jsme si však nevzali poučení a letos chceme překonat nejen sebe, ale i všechny soupeře ještě lépe implementovanými sofistikovanými technologiemi. To se nám může splnit jednak díky loni nabytým zkušenostem, jednak i díky loni nabraným novým patnácti členům, jimiž se MART rozšířil více než trojnásobně. Jedním z cílů je přeci popularizovat robotiku na MFF UK.
Co je to Eurobot?
Eurobot je soutěž pro autonomní roboty. Autonomním se zde rozumí řízené vlastním rozumem robota (tedy žádné dálkové ovládání). Vždy 2 roboti se utkávají v zápasech na hřišti 2x3 metry a hrají podle pravidel, která se stanovují každý rok nová.
Letos mají být roboti obzvláště konstruktivní—budou totiž stavět chrámy Atlantidy. [Aspoň tak praví pravidla]. Tyto stavební prvky budou dvojí—jednak puky či bubny, ze kterých se dají skládat sloupy, jednak překladové trámky, jimiž lze překlenout dva sousedící sloupy.
Náš robot
Základem letošního robota je deska Beagleboard s procesorem 1200MIPS ARM operujícím pod systémem Debian Linux. Samotný software členíme do tří vrstev abstrakce.
Nejvyšší vrstvu nazýváme mozkem. V ní se provádějí úkony abstrahované od samotného robota - určuje se zde strategie, podle které se bude robot v dané chvíli chovat. K dosažení zamýšleného cíle mozek vydává povely ostatním zařízením (kola, senzory, ruka...).
Na střední vrstvě se odehrávají nejzajímavější věci. Zde se například pomocí OpenCV (Open Computer Vision) zpracovává obraz, který přichází ze dvou kamer, a rozpoznávají se v něm smysluplné objekty, jako jednotlivé stavební prvky a stavební plochy. Do této vrstvy spadá i lokalizace (určování aktuální polohy robota), již provádíme sofistikovanou a prověřenou metodou Monte Carlo. Letos bychom navíc chtěli implementovat vylepšené plánování dráhy za využití hermitovských křivek.
Na nejnižší softwarové vrstvě jsme oproti loňsku přešli z pomalé sběrnice I2C na rychlou a rušení odolnou sběrnici CAN (Controller Area Network) známou např. z automobilového průmyslu. Což nám přineslo možnost zrychlení komunikace mezi jednotlivými hardwarovými prvky, ale zároveň i mnoho práce se zprovozněním.
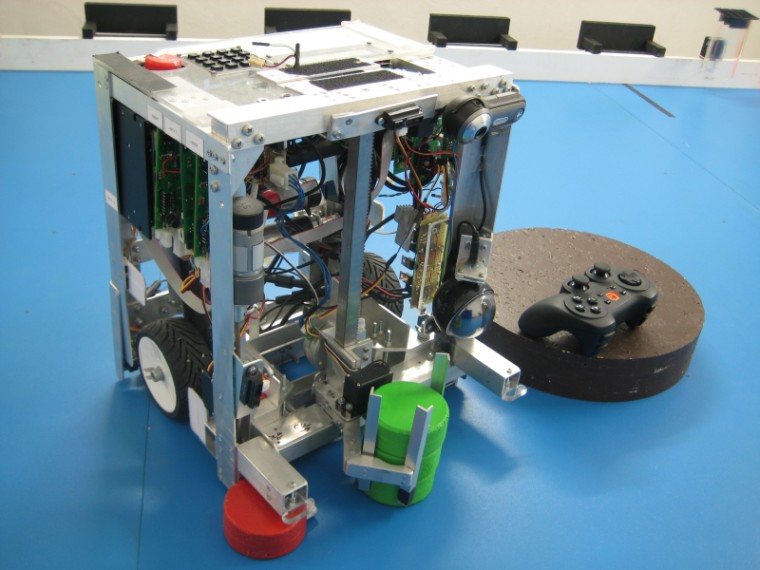
Nyní se je třeba ještě zmínit o hardwarové stránce našeho robota. Robot je osazen kvalitními motory od firmy Maxon řízenými jednotkou EPOS (Easy positioning system), což je naše jediná "doma nevyráběná" řídící deska. Veškerá další řídící elektronika (destičky pro získavaní dat ze senzorů, ovládání krokového motoru a serv ruky a ovládání motoru vyhazovače s enkodérem) jsou vlastní návrhy vyráběné technologíí SMD a jejich mikrokontrolery mají implementován náš vlastní CAN stack. Údaje z enkodérů zpracováváme pomocí FPGA Xilinx (field programmable gate array).
Pro manipulaci s herními prvky jsme rozmysleli mnoho různých návrhů mechanických manipulátorů. Můžete si je všechny prohlédnout na videích v galerii. Vítězně z nich nakonec vyšel Honzův "dohazovač" sestávající z ruky sbírající puky z hrací plochy a pacičky na tyčích k vyhazování puků ze zásobníku. Ruku se třemi stupni volnosti (otevírání prstu, rotace, vertikální jízda po hřebenové tyči) jsme si navrhli a vyrobili na koleji. A používáme ji jak ke sbírání bubnů, tak ke stavbě chrámů. K lokalizaci využíváme vlastních majáčků, kombinujících ultrazvuk a infračervené záření. Majáčky se osvědčily už vloni. Letošní změnou je přechod na méně běžnou ultrazvukovou frekvenci. Na nejběžnějších 40kHz bylo vloni poněkud hlučno - potkali jsme dokonce tým jehož majáček měl snad 20 reproduktorů a jejich robot se lokalizoval podle intenzity zvuku. Jejich ultazvuk úplně překřičel ten náš. V takové situaci nepomůže ani sebelepší (samoopravné) kódování.
Our sponsors:
Can't connect to the DB!